Blood clot formation in blood vessels, known as thrombosis, can lead to severe medical conditions such as stroke, heart attack, and deep vein thrombosis. Current treatment methods, including catheter-based thrombectomy and thrombolytic drug administration, have limitations in accessibility and precision, particularly in complex and small vascular networks.
Recent advancements in microrobotics offer a promising alternative for minimally invasive interventions. Untethered microrobots, controlled wirelessly using external magnetic fields, provide precise navigation and targeted interaction with blood clots. These robots have the potential to overcome arterial flow, reach deep-seated thrombi, and perform mechanical fragmentation or assist in hybrid thrombus dissolution using a combination of mechanical disruption and chemical lysis.
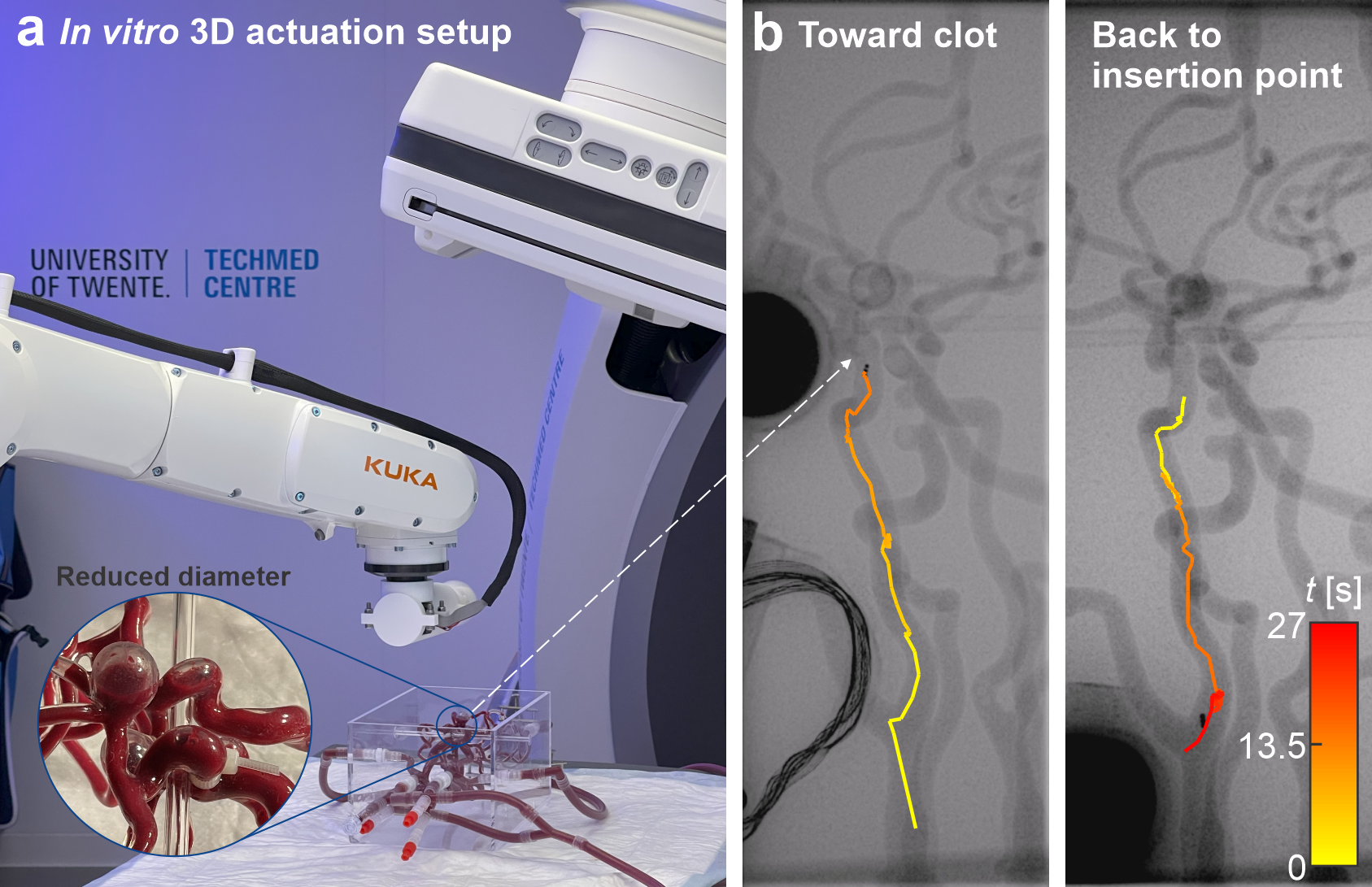
This study explores the design and performance of such microrobots in ex vivo and in vitro vascular models (Figure a). The effectiveness of mechanical fragmentation and hybrid dissolution is evaluated across different clot compositions to better understand how factors like fibrin and red blood cell content influence clot removal efficiency. These findings contribute to the development of next-generation robotic solutions for endovascular therapy.
https://www.foxnews.com/tech/how-tiny-corkscrew-robots-could-save-lives-by-breaking-up-blood-clots
https://www.rd.nl/artikel/1045295-nederlandse-onderzoekers-laten-robot-door-bloedvat-zwemmen
Objective:
Demonstrate Microrobot Navigation in Vascular Networks – Validate the ability of the microrobot to navigate complex vascular models (Figure b), including cerebral and iliac artery systems, using wireless magnetic control.