Context:
Traditionally, design of robots and their actuation systems relied heavily in the intuition of its designers. Intuitive heuristics, such as reachable workspace and maximum continuous torque in worst-case configurations, have been important design tools for a long time. However, this rarely leads to an optimal robot design in terms of capabilities or (energy) efficiency. These problems become even more significant as robots are moving out of structured lab/industrial environments into the real world, and are expected to perform varying tasks, often on battery power. Therefore, there is a clear need to design robots in a more holistic manner: The best robot for the task(s).
Simultaneously, the need for more dynamic robots has promoted the development of actuators using high torque electrical motors combined with lower gear ratios – quasi-direct drive or proprioceptive actuation. These actuators have reduced reflected inertia, higher speeds and efficiency, and generally reduced output impedance with better interaction capabilities. However, again, the appropriate design parameters for a given robot and task(s) are not clear.
State-of-the-art:
Recent work by us and other authors has led to a number of co-design approaches, where the robot’s design and behaviour (control) are simultaneously optimised, typically with the goal of finding the best robot design for a certain (set of) task(s) (and potentially a controller to go with it). We are primarily interested in the design aspect. Previous students in this line of research have developed both 1) a co-design framework based on trajectory optimisation, capable of selecting optimal motor and gearing design parameters for a given robot, and 2) a proof-of-concept prototype robot, aimed at validating the modelling aspects. Both of these areas present opportunities for further development.
This assignment:
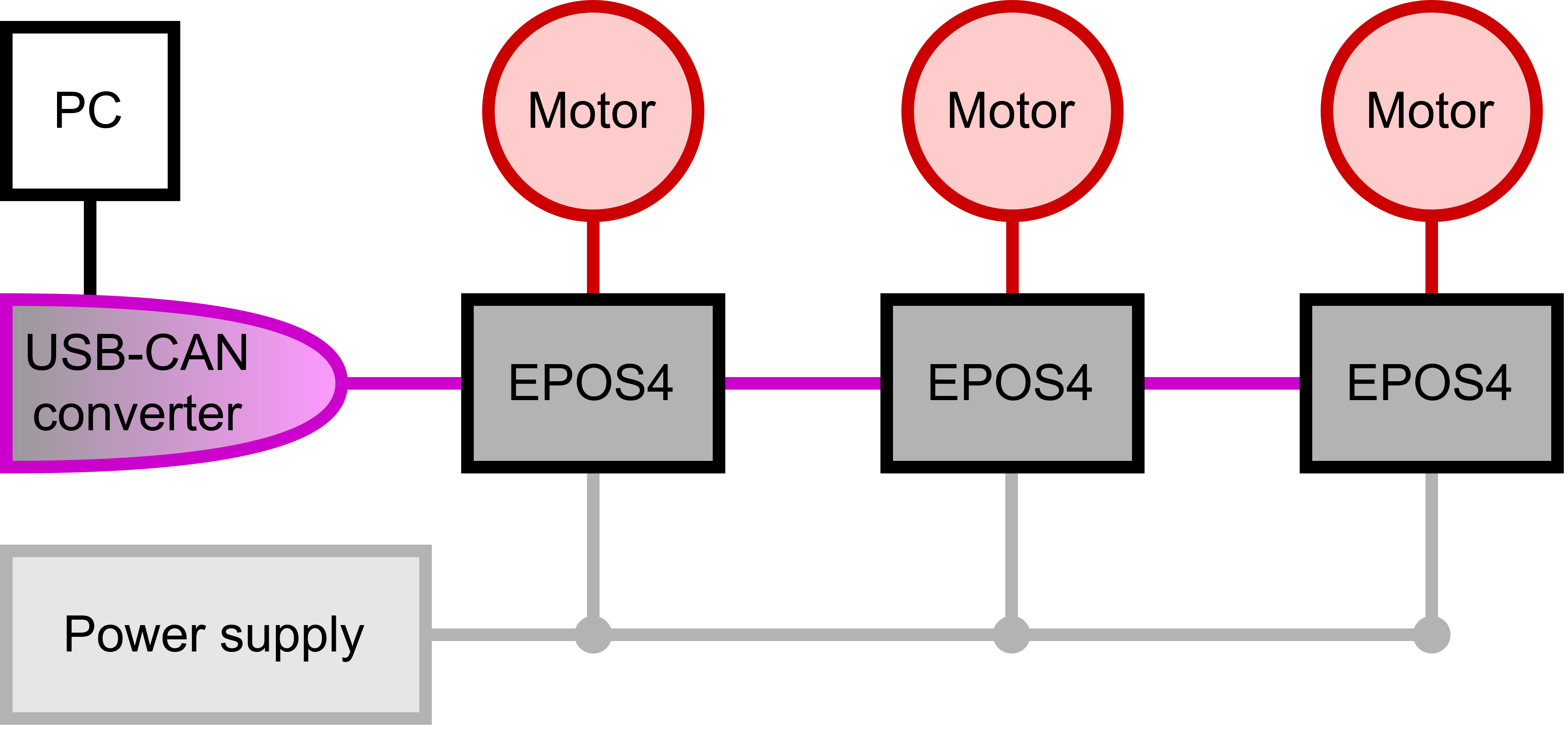
This assignment focuses on the second aspect; the proof-of-concept experimental prototype (see below). You will focus on developing the software components necessary to communicate with the Maxon EPOS motor controllers (using CAN) from a (Linux) PC, and develop the software infrastructure to perform experiments and gather/store/present data. You will demonstrate your results using experiments on the real robot.
This assignment is a collaboration with the engineering team of maxon Benelux and the Robotic Drive Systems team of maxon Switzerland. Maxon will support the research by providing insights into current development tools and methods, provide data of drive system components and support during commissioning and operation of prototypes.
This assignment is also available as MSc thesis project, with larger scope:
Towards the best robot for the task: Experimental validation of co-design models and methods
To find out more, contact Wesley Roozing.
Requirements:
-
Student BSc Advanced Technology, BSc Electrical Engineering, BSc Technical Computer Science, or related field;
-
Linux, Python, and git experience are a must;
-
Experience with CAN (controller area network) bus is preferred.
 |
 |