The NWO "perspectief" program wearable robotics aims at developing technology to truly augment or restore human motor functions. The envisioned Exo-aids will allow for agile and versatile movements. The developed technology will be integrated in Exo-aids for three applications that have a high socio-economic impact:
- to restore mobility in patients with a spinal cord injury;
- to prevent progressive function loss in patients with muscular dystrophy; and
- to prevent work-related musculoskeletal disorders in dynamic heavy lifting (industry workers) or static high-precision work (medical surgeons).
RAM participates in this program, by leading project 5, “Embedded sensing in 3D printed exo-aid structures”, we aim at developing soft 3D printed parts with integrated sensing structures for the exo-aid systems. These parts will help monitor the electrophysiological processes by integrating pressure sensors, electrodes, wiring and amplifier modules. Some advantages of such parts are:
- Improved ease of use (easy donning and customized fit)
- Intuitive use (sensory-based user-intent determination)
- Higher functionality (by increased sensing possibilities)
- Larger flexibility (sensing structures are flexible as well)
- Improved performance (due to customized sensor designs that tightly conform to the body)
To make these parts possible, we are developing a multi-material fabrication process that combines multiple Fused Deposition Modelling printheads and the deposition of silver inks [9]. We are also developing electronics that enable us to do better measurements with dry, 3D printed, bio-potential electrodes, e.g. electrodes for sEMG .

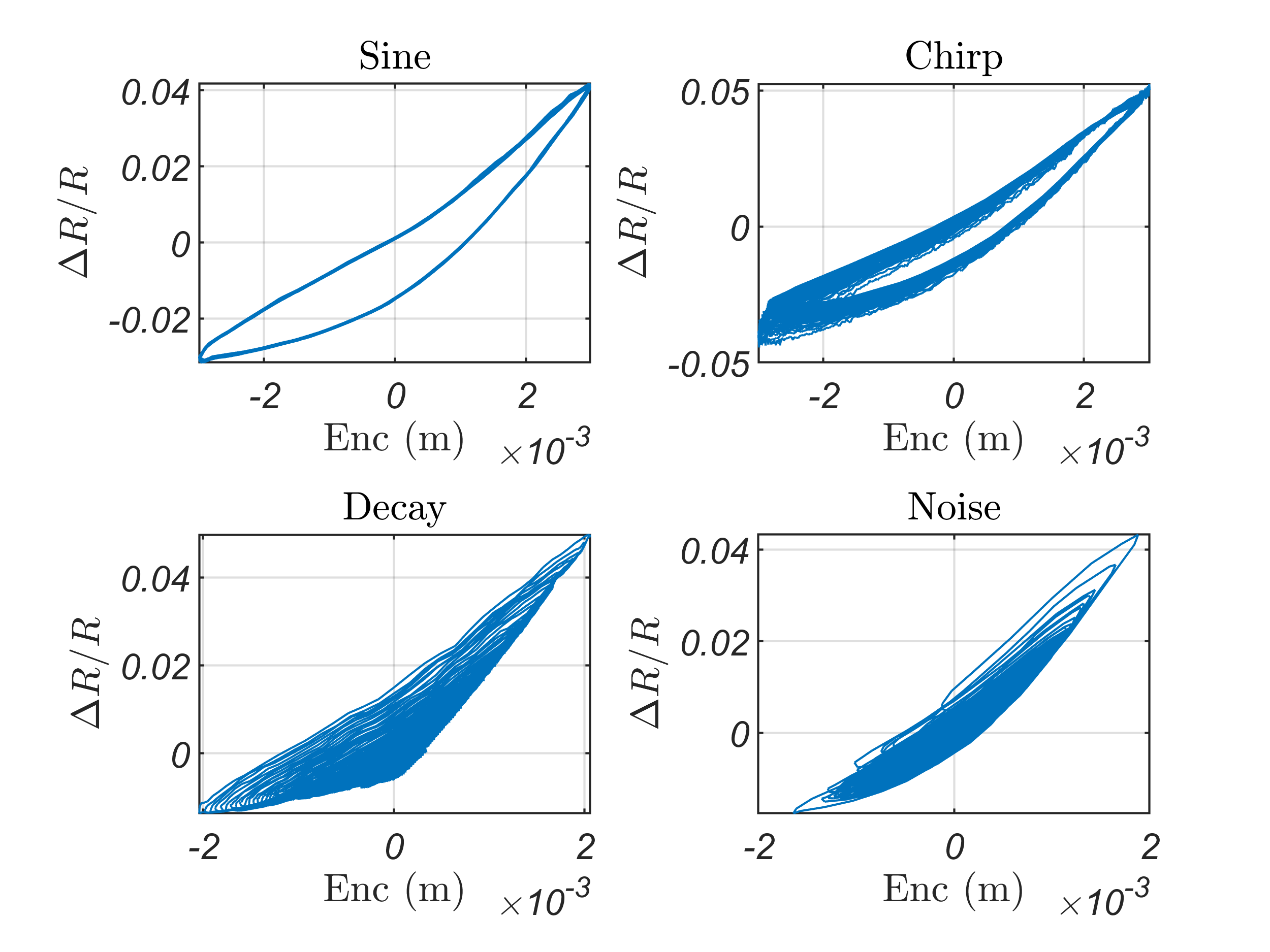
We also work on fabricating 3D printed force sensors to measure the interaction forces [10,11]. Because the materials used for these sensors often show hysteresis and drift, we work on techniques to linearize the output of these sensors [2,4,5]. Furthermore, because the 3D printed conductors can be non-uniform and anisotropic, we also work on better understanding and
measuring the anisotropy introduced by 3D printed conductors [1,3,6,8].
By developing these technologies, we aim to reduce the assembly and number of electronic interfaces required and increase the customizability and capability of future exoskeletons parts.
More information about the program can be found at https://www.wearablerobotics.nl/.
Publication list:
[1] Dijkshoorn, M. Schouten, G. Wolterink, R. Sanders, S. Stramigioli and G. Krijnen, "Characterizing the Electrical Properties of Anisotropic, 3D-Printed Conductive Sheets for Sensor Applications," in IEEE Sensors Journal, doi: 10.1109/JSEN.2020.3007249 (Open access).
[2] M. Schouten, B. Prakken, R. Sanders and G. Krijnen, "Linearisation of a 3D printed flexible tactile sensor based on piezoresistive sensing," 2019 IEEE SENSORS, Montreal, QC, Canada, 2019, pp. 1-4, doi: 10.1109/SENSORS43011.2019.8956652 (Open access).
[3] A. Dijkshoorn, M. Schouten, G. Wolterink, R. Sanders and G. Krijnen, "Characterizing the Electrical Properties of Anisotropic, 3D-Printed Conductive Sheets," 2019 IEEE International Conference on Flexible and Printable Sensors and Systems (FLEPS), Glasgow, United Kingdom, 2019, pp. 1-3, doi: 10.1109/FLEPS.2019.8792279 (Open access).
[4] D. Kosmas, M. Schouten and G. Krijnen, "Hysteresis Compensation of 3D Printed Sensors by a Power Law Model with Reduced Parameters," 2020 IEEE International Conference on Flexible and Printable Sensors and Systems (FLEPS), 2020, pp. 1-4, doi: 10.1109/FLEPS49123.2020.9239580 (Open access).
[5] M. Schouten, D. Kosmas and G. Krijnen, "Hysteresis Compensation of 3D Printed Sensors Using a Power Law Model for Various Input Signals," 2020 IEEE SENSORS, 2020, pp. 1-4, doi: 10.1109/SENSORS47125.2020.9278942 (Open access).
[6] A. Dijkshoorn, M. Schouten, G. Wolterink, R. Sanders, S. Stramigioli and G. Krijnen, "Characterizing the Electrical Properties of Anisotropic, 3D-Printed Conductive Sheets for Sensor Applications," in IEEE Sensors Journal, vol. 20, no. 23, pp. 14218-14227, 1 Dec.1, 2020, doi: 10.1109/JSEN.2020.3007249.
[7] G. Wolterink, A. Umrani, M. Schouten, R. Sanders and G. Krijnen, "3D-Printed Calorimetric Flow Sensor," 2020 IEEE SENSORS, 2020, pp. 1-4, doi: 10.1109/SENSORS47125.2020.9278640 (Open access).
[8] A. Dijkshoorn, M. Schouten, S. Stramigioli and G. Krijnen, "Modelling of Anisotropic Electrical Conduction in Layered Structures 3D-Printed with Fused Deposition Modelling" Sensors 21, 2021, no. 11, pp. 3710. https://doi.org/10.3390/s21113710
[9] M. Schouten, G. Wolterink, A. Dijkshoorn, D. Kosmas, S. Stramigioli and G. Krijnen, "A Review of Extrusion-Based 3D Printing for the Fabrication of Electro- and Biomechanical Sensors," in IEEE Sensors Journal, vol. 21, no. 11, pp. 12900-12912, 1 June1, 2021, doi: 10.1109/JSEN.2020.3042436 (Open access).
[10] M. Schouten, P. Patel, R. Sanders and G. Krijnen, "3D Printed Differential Force and Position Sensor Based on Lossy Transmission Lines," 2021 21st International Conference on Solid-State Sensors, Actuators and Microsystems (Transducers), 2021, pp. 1460-1463, doi: 10.1109/Transducers50396.2021.9495724 (Open access).
[11] M. Schouten, C. Spaan, D. Kosmas, R. Sanders and G. Krijnen, "3D printed capacitive shear and normal force sensor using a highly flexible dielectric," 2021 IEEE Sensors Applications Symposium (SAS), 2021, pp. 1-6, doi: 10.1109/SAS51076.2021.9530032 (Open access).