Soft pneumatic actuator is a category of soft actuators that are activated by controlling air pressure within the actuator. Due to their compliance, low cost, lightweight structure, and ability to adapt to unknown environments, these actuators have many applications in various domains, such as minimally invasive surgeries, rehabilitation/wearable robots, and soft grippers.
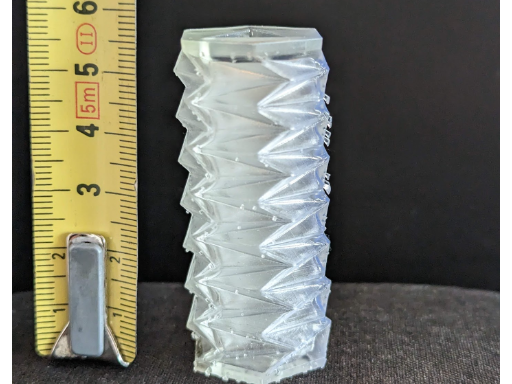
Figure 1 A prototype of the soft origami-inspired pneumatic actuator manufactured using Formlabs SLA 3D printer.
We have previously designed a 3D-printable soft pneumatic actuator which uses geometric origami folding patterns (see Figure 1). The designed actuator is capable of moving in 3 degrees of freedom: 2 bending directions and compression/elongation. As a next step, the actuator’s response needs to be investigated for control purposes.
Goal:
- Create a setup for demo/experimentation. This will involve optimizing the 3D printing process for manufacturing the actuator, designing the setup, working with position/force sensors, etc.
- Workspace characterization: checking what is the operating range of this proposed actuator. How much can it compress/extend and bend? What are the input pressures required to achieve this workspace? What is the size of this workspace?
- Output force characterization: how much force can the actuator exert to the external environment? How linear is the force response over the operating input pressure?