Robotics is increasingly focusing on control frameworks implementing the transition from industrial cages to unstructured environments. In this context, the role of energy transfers between the robot, the controller, and its surroundings, is crucial to assess important system theoretic properties (e.g. stability, passivity), safety metrics, and behavioral patterns of the controlled robot.
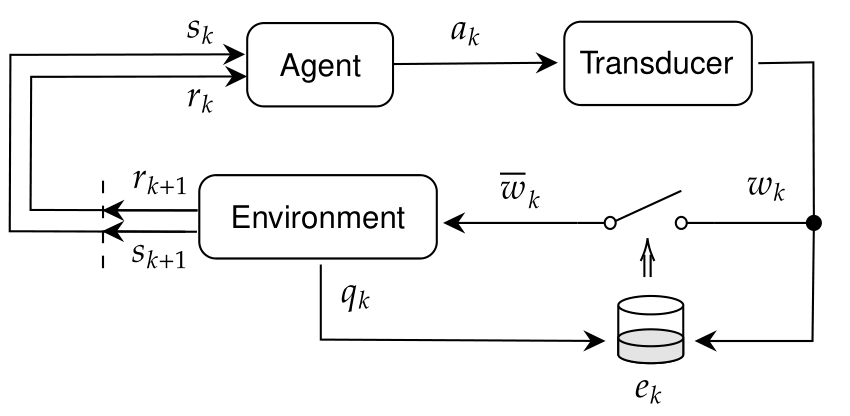
The assignment hinges upon producing experimental results based on our recent paper [1], in which reinforcement learning policies are learned within a context of virtual energy tanks, a control technique that serves to passivize any control algorithm [2]. The goal is to develop new energy-aware control strategies that can be used to achieve safe and expressive behaviors along complex tasks.
Our partner MABROBOTICS (www.mabrobotics.pl) will provide us with two novel actuators that will be used throughout the thesis.
[1] Zanella, R., Palli, G.,Stramigioli, S., Califano, F.: Learning passive policieswith virtual energy tanks in robotics. IET ControlTheory Appl. 1–10 (2024).https://doi.org/10.1049/cth2.12558
[2] F. Califano, R. Rashad, C. Secchi, and S. Stramigioli, “On the Use of Energy Tanks for Robotic Systems,” in Human-Friendly Robotics 2022, P. Borja, C. Della Santina, L. Peternel, and E. Torta, Eds. Cham: Springer International Publishing, 2023, pp. 174–188