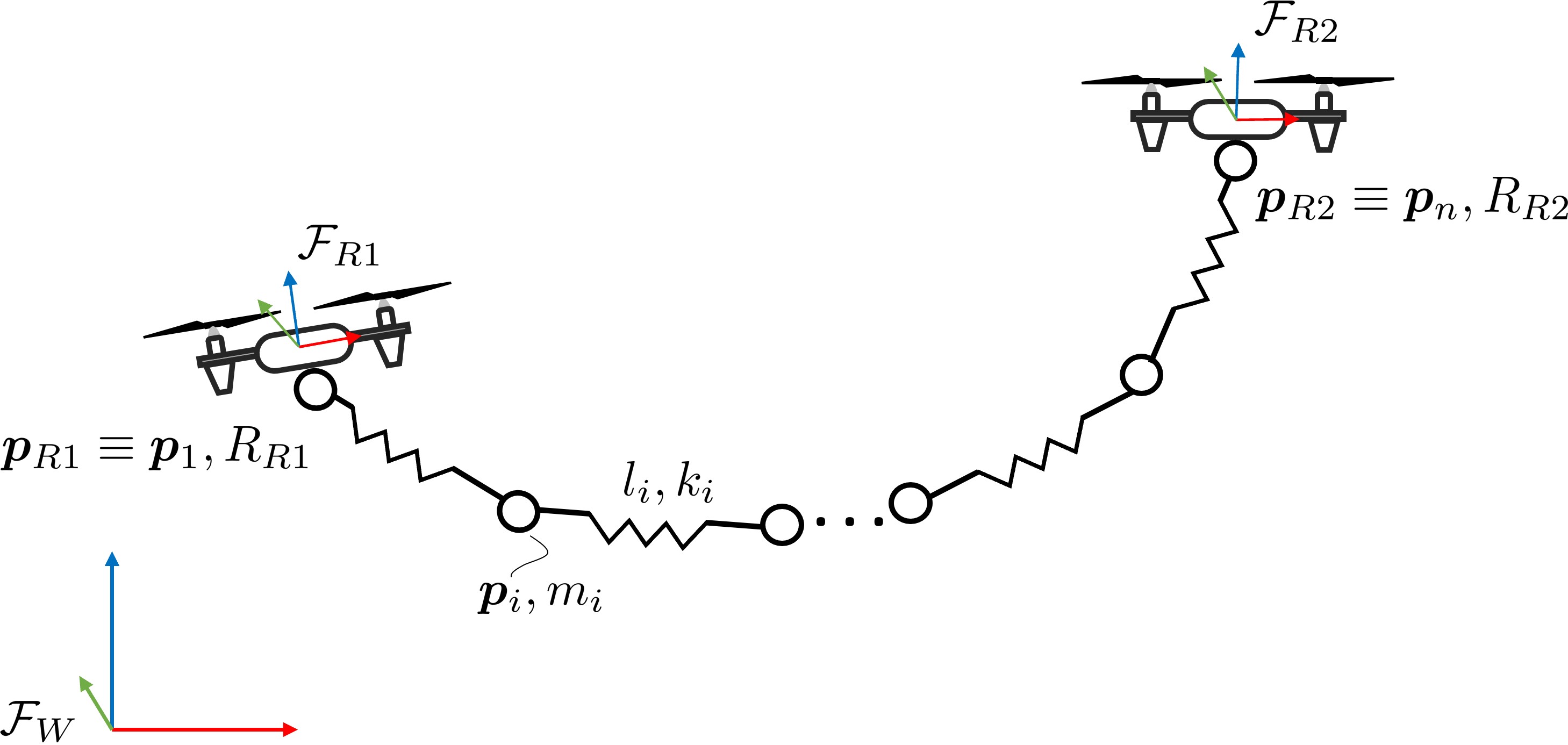
This assignment follows the model and control scheme proposed in [1] for the manipulation of elastic and flexible cables by two aerial robots. The assignment is in the scope of the Flyflic project application scenario for the collection of floating objects on the surface of the water. The differential flatness of the aforementioned system has been proven used for control in [1] in a simulated environment. However, the method has not yet been tested in a real-world environment. The mismatch between the model of the cable used in the controller and the behavior of the real cable, as well as aerodynamic interferences caused, e.g., by the propellers of the robots, could affect the performance.
This assignment aims to answer the following questions:
What is the error obtained when the coefficients of the model proposed in [1] are estimated in a real indoor setup?
What is the error obtained when such a model is used in the controller proposed in [1]?
[1] Gabellieri, C., and Franchi A., Differential Flatness and Manipulation of Elasto-flexible Cables Carried by Aerial Robots in a Possibly Viscous Environment, 2023 International Conference on Unmanned Aircraft Systems (ICUAS), 963-968