How to apply
This assignment will be supervised by Prof. Dr. Ir. Stefano Stramigioli and Dr. Ir. Chiara Gabellieri as the daily supervisor. If you are interested in applying, please send an email to s.stramigioli@utwente.nl and c.gabellieri@utwente.nl attaching a copy of your CV and transcript of records.
Assignment description
is one of the main global challenges at the moment, and how we produce electricity is one of the main sources of greenhouse gases. Part of the
solution is finding new ways to exploit renewable, green energy sources, and this is exactly what Wave Hexapod does. Wave Hexapod is a company based
in Dordrecht that aims at harvesting clean energy from the ocean waves with the following concept (https://wavehexapod.com)
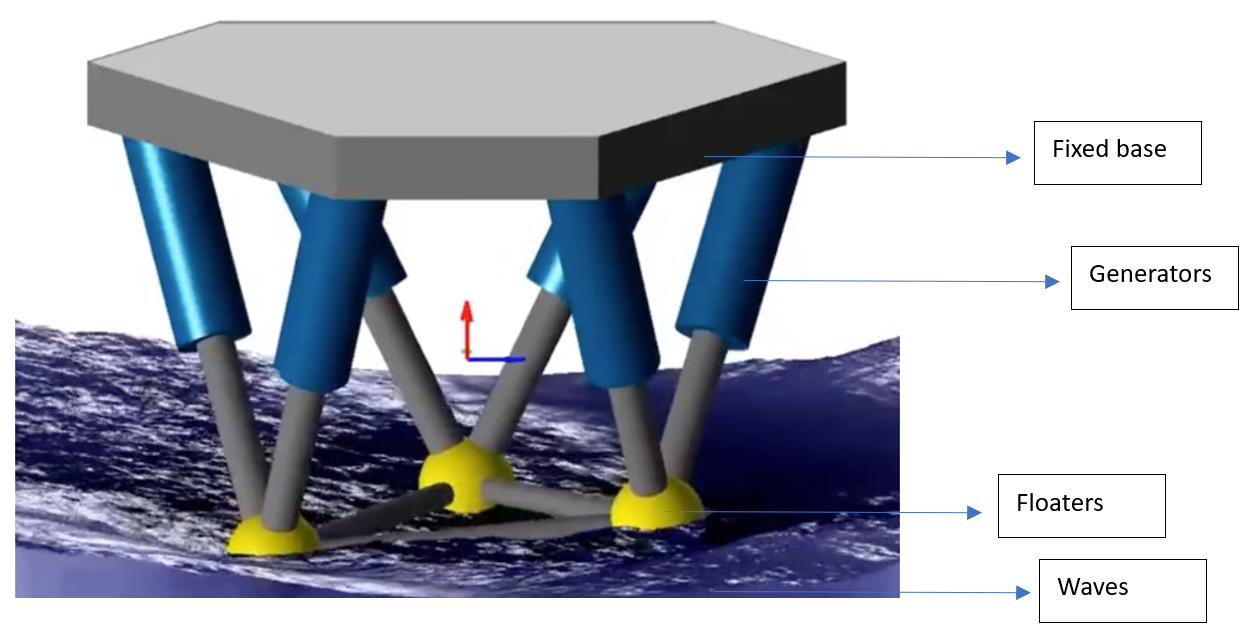 Source: https://wavehexapod.com
Source: https://wavehexapod.comlinear actuators per floater, there will be a 6 DoF robot arm per floater. The main research question is
Which are the platform’s dynamics model and simulator that consider all the
proper interaction ports between the system elements?
assignment in more detail:
- Look for existing models of the ABB IRB 7600 series robot. If none is found, use a generic model of a 6 DoF robot arm
- Model the system composed of the fixed base, 3 robot arms, and 3 floaters in 20-sim, including a model of the waves
Additional steps (they are a plus): - Design the control of the robot arms so as to
- Harvest the maximum energy from the waves
- Avoid the arm singularities by exploiting the redundancy of the system as a whole
- Test the controller on a hardware setup
Modeling Considerations
The Model will be developed using polymorphic port-based techniques which are the best way to model the multi-physics and specifically the characterization of the energy harvesting. Polymorphic means that all submodels will have a "type" characterized by the kind of external ports to which such a submodel can be connected. It will be then easily possible to change the implementation of such models by first starting with simple models and then extending their details as needed. Port-based means that a proper power structure of each port is preserved all the time and in this way, the analysis of energy harvesting will be directly expressed. Furthermore, the package 20sim will be used which will allow multi-body modeling as well as a consistent energy analysis.
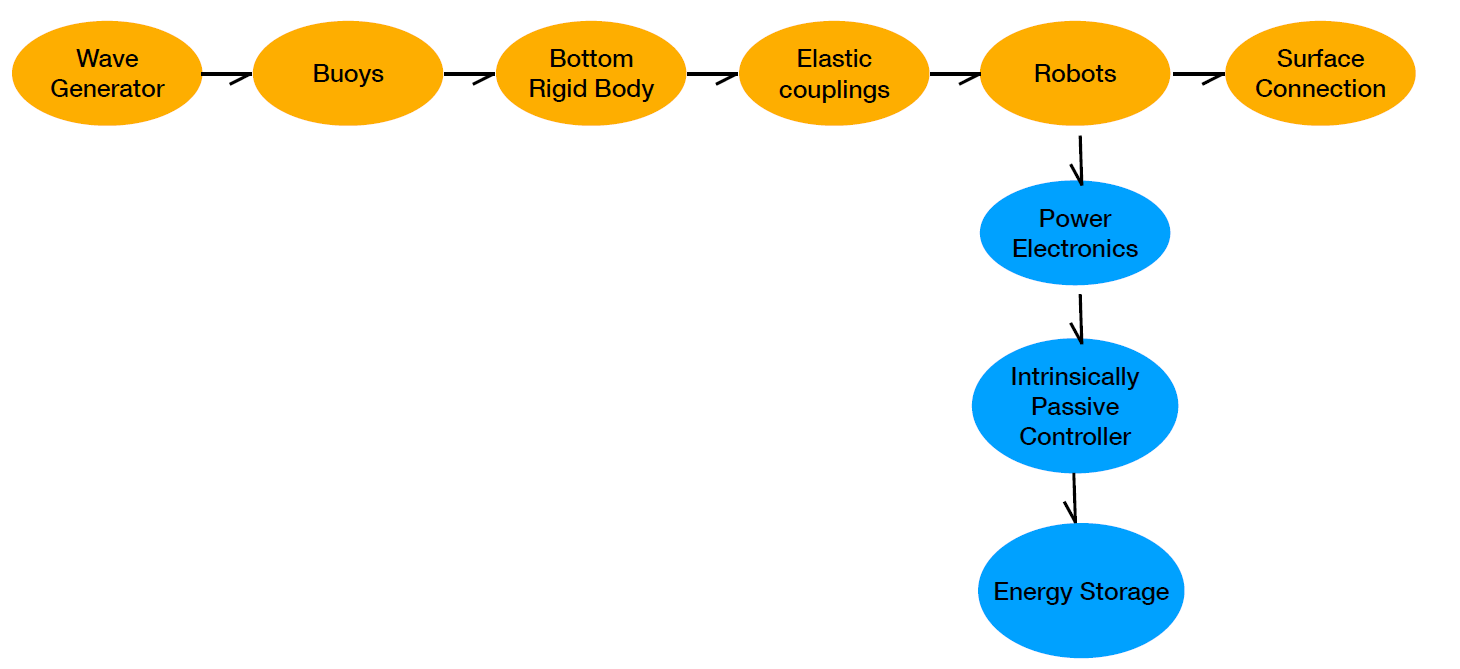
Wave Generator: The wave generator will create a dynamic surface motion, which will be tunable for simulations.
Buoys: The Buoys will be modeled as two-port elements. One port will be attached to the wave generator and depending on the pose and the submersion level will generate a wrench which will be applied to the connecting body which is rigidly connected to the Buoys
Connecting Body: The Connecting body will be a rigid body with a certain inertial ellipsoid connecting the forces generated by the Buoys
Elastic Connections: The elastic connections will be dual port elements with wrenches and twists pair on both sides. One side will be connected to the Connecting Body and the other one will be connected to the Robots
Robots: The robots will have two mechanical ports and a multidimensional electric one. The two mechanical ports will be connected to the elastic connection on one side and to the fixed base on the other. The multidimensional electric side will be directly used to analyze the harvested energy and will be connected to a controller that will create the torques via current supply and proper modeling of the electrical side.
Singularities
The relative motion of a rigid body is 6 dimensional. If each of the legs of the Steward platform is implemented with 6 degrees of freedom (dof) manipulators, this will result in at least 18 dof, which gives redundancy in the null space of the mechanism of 12 dof. Kinematic singularities should be identified and a joint-based repulsive potential created to prevent the system from reaching such singularities during operation.
Elastic Coupling
The elastic coupling will be fundamental to prevent damage to the robots and should be dimensioned based on the maximum forces and twists that the manipulator can support.