Keywords: Liver cancer, surrogate signal, medical images, correspondence model
Project Description:
Liver cancer is one of the leading causes of cancer death [1]. Percutaneous procedures such as liver biopsy and tumor ablation, require an accurate localization of the tumor to avoid misdiagnosis, destruction of healthy tissues, and incomplete treatment [2].
Respiratory motion limits the accuracy of abdominal/thoracic percutaneous procedures. The tumor's position changes with time and current imaging modalities fail to provide high-quality real-time visualization [3].
Motion tracking techniques are an attractive approach to accurately estimate the real-time position of the tumor using surrogate signals. This research aims to create a respiratory motion estimation model of the liver using the information provided by surrogate signals and imaging data of the liver.
Machine learning algorithms should be implemented to create a correspondence model between the surrogate signal and the ground truth obtained through medical imaging modalities. Signal processing, image processing, and computer vision algorithms will be implemented to process the different datasets (surrogate signal and ground truth).
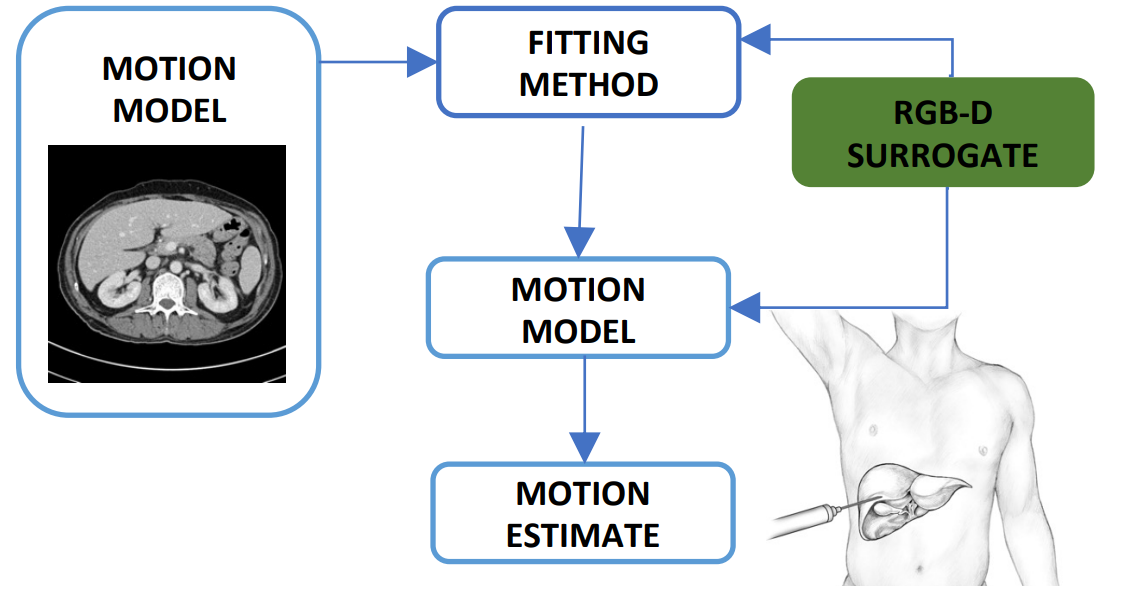
Fig 1. Respiratory motion estimation workflow.
References
[1] World Health Organization. (2020, February 3). “Cancer.”
[2] Abayazid, M., Kato, T., Silverman, S. G., and Hata, N. (2018). Using needle orientation sensing as surrogate signal for respiratory motion estimation in percutaneous interventions. International journal of computer assisted radiology and surgery, 13(1), 125-133.
[3] Fahmi, S., Simonis, F. F., & Abayazid, M. (2018). Respiratory motion estimation of the liver with abdominal motion as a surrogate. IJMRCAS.