The challenge we currently face in actuation design of robots is that we want high power, high torque ánd high efficiency while staying light and compact. This is a hard challenge, but luckily, we can copy nature. As our muscles have found solutions to the exact same problems! Animals use elasticity and bi-articulation (i.e. muscles spanning over multiple joints) in their bodies to improve efficiency and power/force production.
But currently, most of the robots still use a stiff mono-articulated actuation topology. Why is that?
Designing actuation topologies is complex, as you need to take into account a lot of variables and unknowns, which makes it a field where you need to gain a lot of experience, and you need to iterate a lot to come up with a good design. Thus, elasticity and bi-articulation are often disregarded to reduce design complexity.
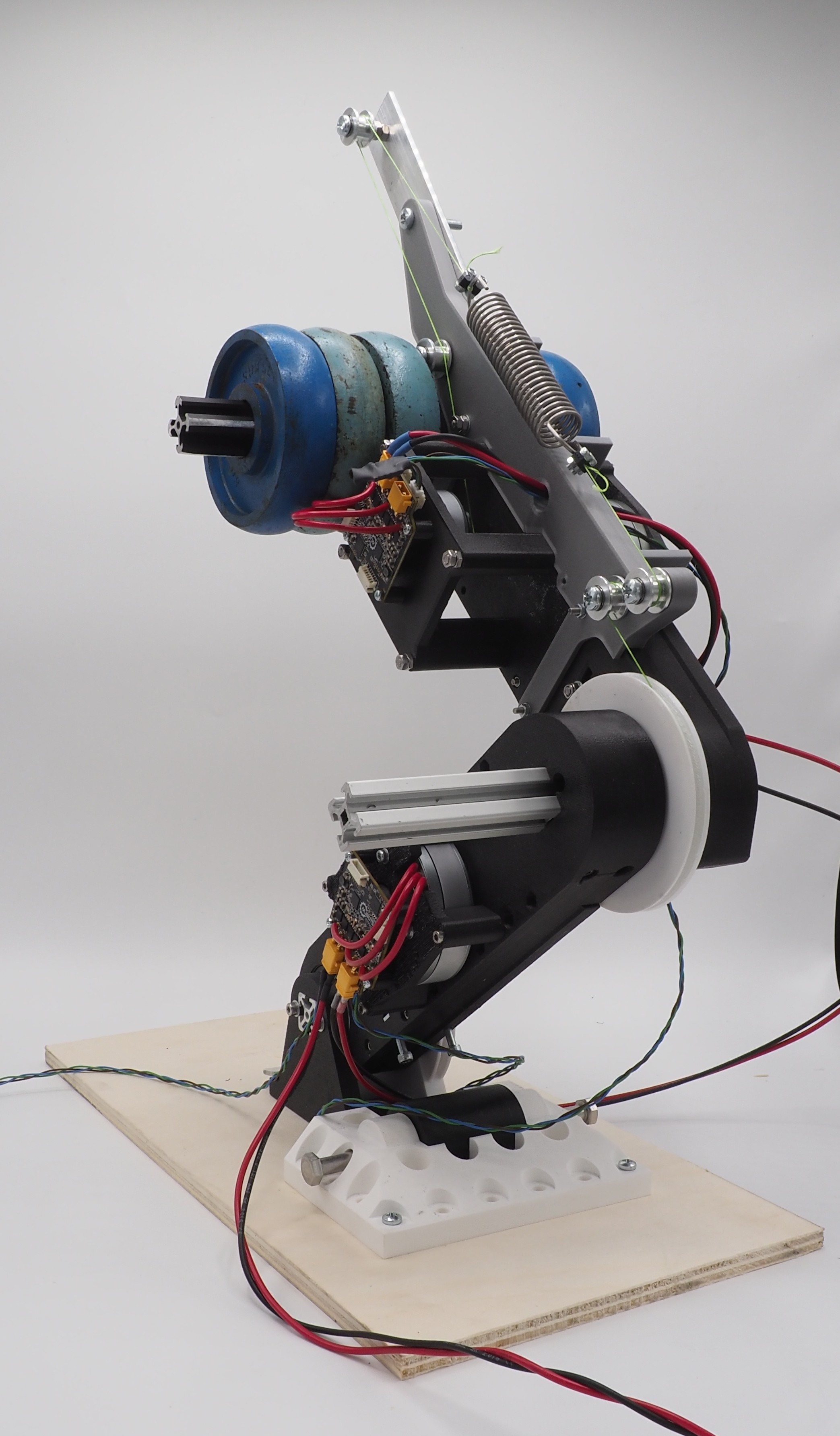
We have developed a method that optimises the movement of your robot while also optimising certain variables of the actuation topology, which is called co-design. We have applied it on a robotic leg to optimise for squatting, and we even developed a prototype to validate our co-design results!