Background:
Fully-actuated UAVs, which, contrary to usual quadrotors, are capable of independently controlling their position and attitude, are becoming more and more popular. Normally, the input to the multirotor control scheme is considered to be the force produced by each propeller. However, we control the spinning velocity of the propeller (although supposing to control it instantaneously and perfectly is also an approximation). The amount of force produced by the propeller is computed based on an identified model. Model errors at this stage translate into errors between the commanded control force and the actual input force produced. Moreover, external disturbances affect this model. Hence, closing the loop of the control of UAVs on the propeller force would be beneficial. The force would become a state of the system, while the input is the propeller commanded velocity or PWM. To so do, it can be beneficial to measure online the force produced by each propeller using additional sensors.
Assignment Description:
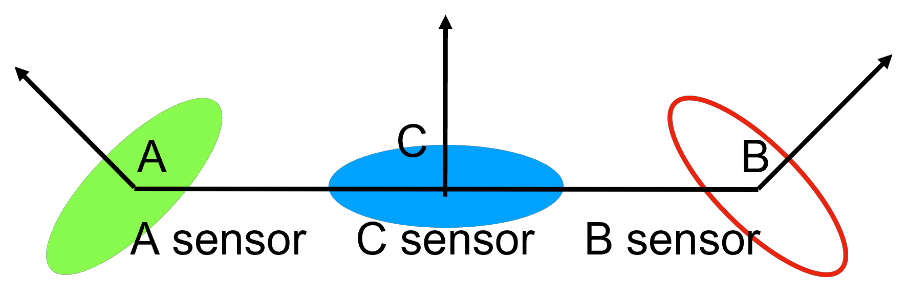
This assignment considers the 2D model of a fully-actuated UAV, which has at least three propellers not all parallel to independently control position and orientation (see the Figure below). We assume to have on each arm of the robot a strain gauge that measures a deflection angle (they introduce elasticity in the system), and we are interested in understanding how it is possible to measure the propeller forces. The assignment starts from the linearized dynamic equations of a planar, fully-actuated multi-rotor embedding elastic elements (modeled as passive revolute joints). In the model, propeller forces are part of the state. The input is the commanded velocity or PWM given to the propellers. The assignment includes the following steps:
- Studying the possibility to measure the magnitude of the 3 forces from the elastic sensors
- Assessing whether, for the previous point, accurate knowledge of the two propeller tilting angles is needed or not
- Studying the possibility to reconstruct the tilting angles i) just using the force sensors ii) adding also the measurement of a 2D accelerometer placed in the middle of the platform
- Understanding if, linearizing the model around a pitched static equilibrium (which makes sense only for a fully actuated platform like this one) we can still measure the 3 forces without knowing the pitching angle.