Greenhouse gas emissions contribute to the dramatic climate change that we are facing, and that already started affecting our lives. Lowering emissions is one of the main global challenges at the moment, and how we produce electricity is one of the main sources of greenhouse gases. Part of the solution is finding new ways to exploit renewable, green energy sources, and this is exactly what Wave Hexapod does.
Wave Hexapod is a company based in Dordrecht that aims at harvesting clean energy from the ocean waves with the following concept (https://wavehexapod.com)
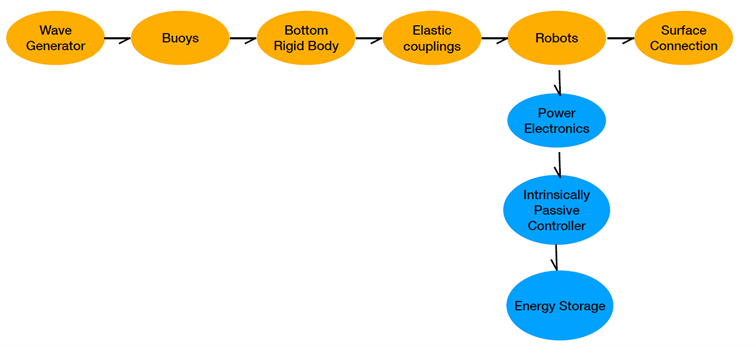
This assignment, which is carried out in the scope of a collaboration with Wave Hexapod, considers a robotic platform composed of three 6-dof robotic arms attached to the surface from one side, and to a floating platform in contact to the waves on the other.
The thesis will start from a port-based model of the system simulated in the 20-sim software, and it will focus on
- Designing the control of the robot arms so as to
- Harvest the maximum energy from the waves
- Avoid the arm singularities by exploiting the redundancy of the system as a whole
- Test the controller in simulation
- Test the controller on a scaled hardware setup
Especially, the control design will consider a power port, or control signal interface, which will represent the control action to optimize the energy transfer by modulating the 6D impedance of the power port connected to the waves. Considering the motion is 6D, such an impedance will be a geometric impedance, which representation will require proper formal tools.