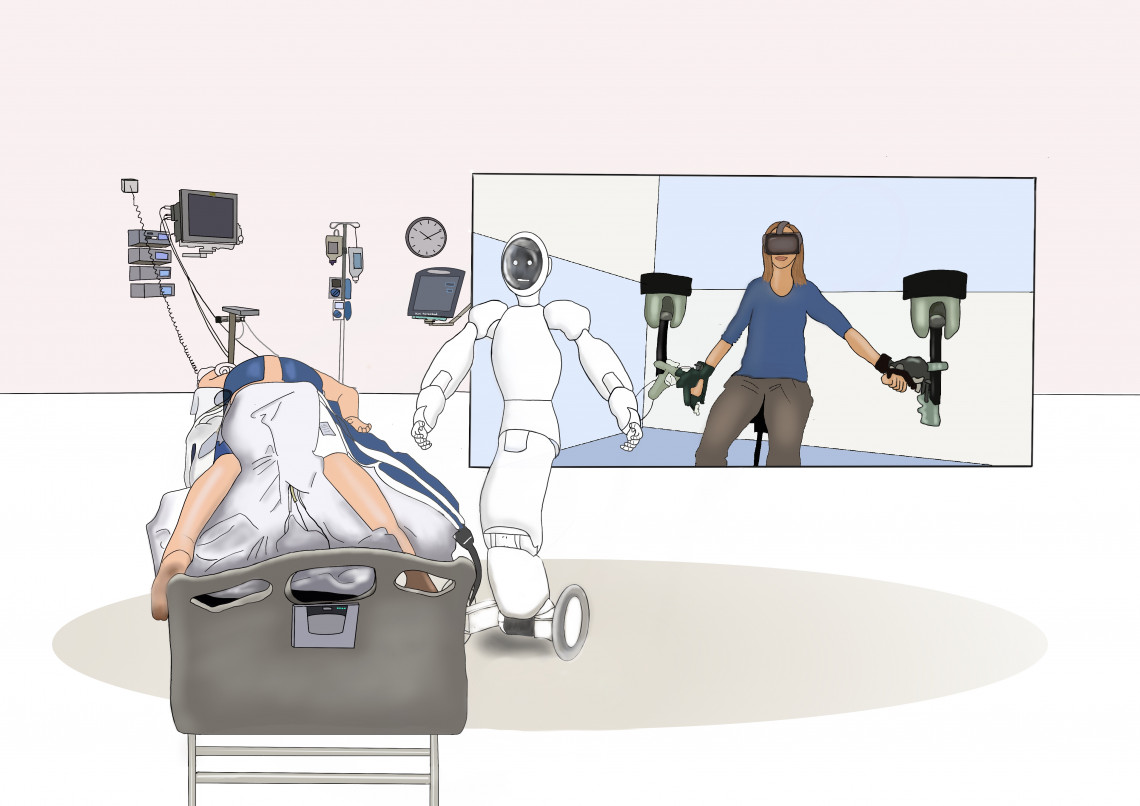
Within the project Predictive Avatar Control and Feedback (PACOF), UT scientists Douwe Dresscher, Felix Schwenninger and Gwenn Englebienne are contributing to a robotic system that allows the operator to experience the location through the robot, seeing and hearing whatever is happening where the robot is.
‘PACOF is part of a larger line of research into creating first avatar systems,’ explains Dresscher. ‘We specifically focus on the manipulation of a robot as an extension of yourself. Mainly, we are looking into delay issues that inevitably occur. There is always a time delay between the operator’s command and the robot’s action, but this delay can have major consequences. We’d like to, on one hand, be able to model and predict what the operator wants to do and steer the robot towards it and, on the other hand, predict the response of the environment to provide the operator with accurate feedback.’
Click here to read the full article.