Some lesions inside the breast can only be detected with MRI, not using mammography (x-ray) or ultrasound. A possible malignant lesion usually needs to be biopsied, but manual MRI-guided breast biopsy procedures are inaccurate and inefficient due to various reasons. A robotic needle manipulator could solve these problems.
The MR safety requirement severily restricts the use of metallic materials near the scanning volume, therefore we develop fully plastic, pneumatically-driven actuators which can be manufactured with rapid prototyping techniques. Five iterations have been developed so far: Stormram 1, 2, 3, 4 and Sunram 5. These are driven by pneumatic linear and curved stepper motors. Current research focuses on development of new generations of MR safe pneumatic actuators and robotic systems.
Click here for a movie about Stormram 4 and here for a movie about Sunram 5.
For a possible assignment please contact Francoise Siepel (f.j.siepel@utwente.nl) or Vincent Groenhuis (v.groenhuis@utwente.nl).
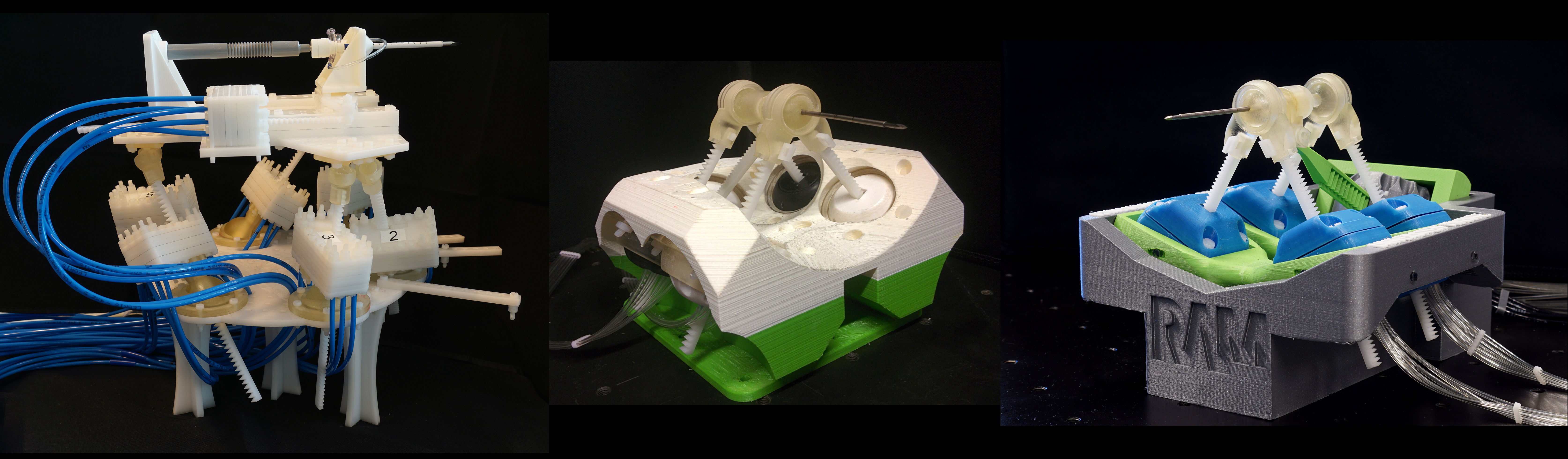
Left to right: Stormram 1, 2 and 3.
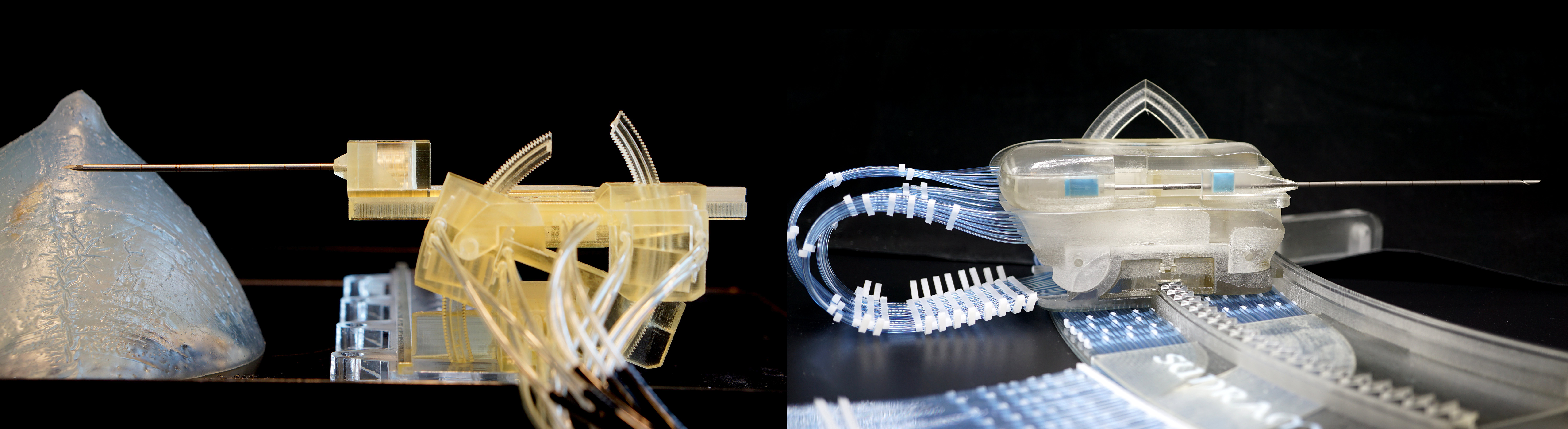
Stormram 4 (left) and Sunram 5.