Overview
Bladder cancer is a common and serious disease, with treatment options such as radical surgery or standard radiotherapy often leading to significant impacts on a patient's physical and emotional well-being. In recent years, there has been growing interest in bladder-sparing strategies that aim to maintain organ function without compromising cancer control. These include advanced radiotherapy protocols, image-guided treatments, and novel marker-based targeting methods [1, 2].
Despite these advances, current clinical tools such as rigid or flexible endoscopes offer limited flexibility and visibility, making it difficult to place treatment markers accurately around tumours. Additionally, conventional imaging methods often struggle to clearly distinguish tumour boundaries, especially in complex areas like the bladder wall.
Goal
The ROADIME – Bladder project builds on these recent developments by introducing a highly targeted approach for marker placement using miniaturised robotic systems. The goal is to improve the precision of placing radio-opaque markers that guide radiotherapy, ultimately enhancing treatment accuracy and reducing side effects.
Research
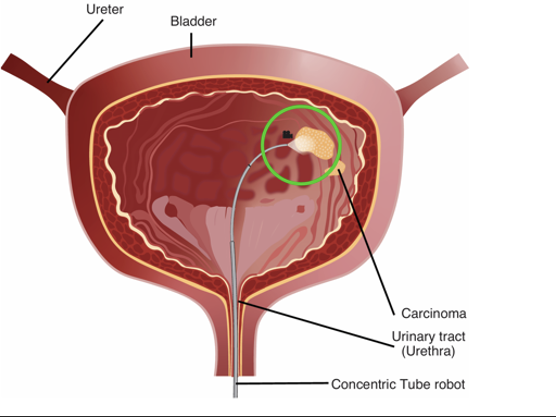
At the heart of this project is the integration of concentric tube robots [3], a cutting-edge class of flexible, steerable instruments that are particularly well-suited for operating in confined and curved anatomical environments like the bladder. These robots can be customised to individual patient anatomy and are guided by real-time imaging technologies, including video and Optical Coherence Tomography (OCT) [4], to support accurate tumour localisation.
By combining robotics, imaging, and patient-specific planning, ROADIME – Bladder aims to bridge the gap between existing imaging limitations and the need for precise, minimally invasive interventions. The approach reflects a broader shift in oncology towards precision medicine, where tools are adapted to the patient’s anatomy and disease profile.
This project is part of the wider ROADIME initiative, exploring the use of Robotics, AI, and Data to support transformative improvements in cancer diagnostics and treatment.
References
[1] Gupta, Shilpa, et al. "Bladder Preservation Strategies in Muscle-invasive Bladder Cancer: Recommendations from the International Bladder Cancer Group" European Urology (2025).
[2] Hijab, Adham, et al. "MR-guided adaptive radiotherapy for bladder cancer" Frontiers in Oncology 11(2021): 637591.
[3] Peyron, Quentin, et al. "Magnetic concentric tube robots: Introduction and analysis" The International Journal of Robotics Research 41.4 (2022): 418--440.
[4] Huang, Juan, et al. "Diagnostic accuracy of optical coherence tomography in bladder cancer patients: a systematic review and meta-analysis" Molecular and clinical oncology 8.4 (2018): 609--612.