Within the Soft Robotic project, we develop patient-specific MR-compatible robotic phantom to simulate respiratory motion in liver.
In percutaneous interventions for hepatic tumor treatment, organ motion caused by respiration can lead to inaccurate needle placement hence less effective therapeutic and diagnostic outcome. The aim of this project is to use soft robotics techniques to develop an actuated phantom that mimics respiratory motion in liver for needle insertion procedures. The actuated liver phantom should be MR-compatible as it will be used for testing needle insertion devices and prototypes in an MRI environment while considering the respiratory motion of the liver. It can also be used for training clinicians on MRI-guided percutaneous needle interventions such as biopsy and ablation. The phantom design also considers the mechanical properties of the layers of tissue that the needle penetrates during the insertion procedure such as skin, fat layer and the liver capsule.
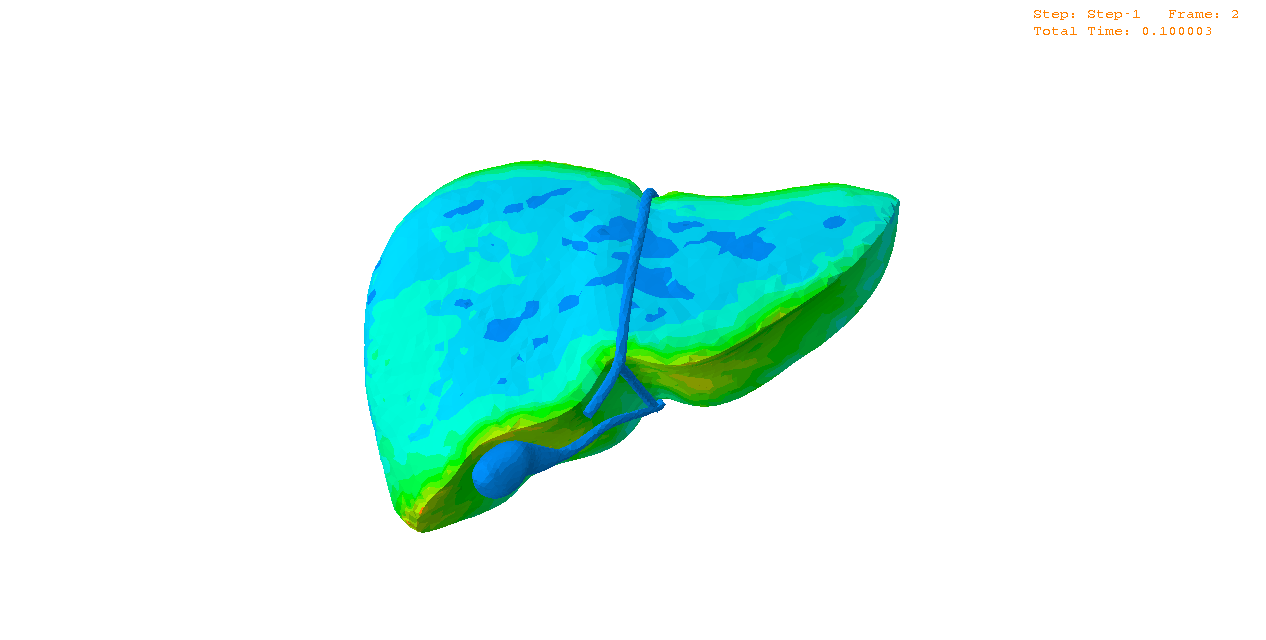
The project is divided into two parts. The first part includes understanding the requirements and specifications of the actuated phantom and then the actual soft robotic design of the phantom. Sensitivity analyses, computational simulations and numerical optimizations are implemented to achieve the key objectives of the first part. The second part of the project is mainly a validation study for testing the actuated phantom in an MRI environment, testing the image artifacts and the compatibility level of the design.