Haptic feedback has been a part of many consumer products for a long time. However, the integration of this feature in the medical field especially minimally invasive interventions is very rare. The objective of the project is to work on a kinesthetic haptic device designed for needle insertion for biopsies, ablations, etc. The device needs some design improvements and to be controlled and integrated with a replica (needle mounted with Franka). It can be tested with a liver phantom to monitor the force-fed back to the user when inserting the needle.
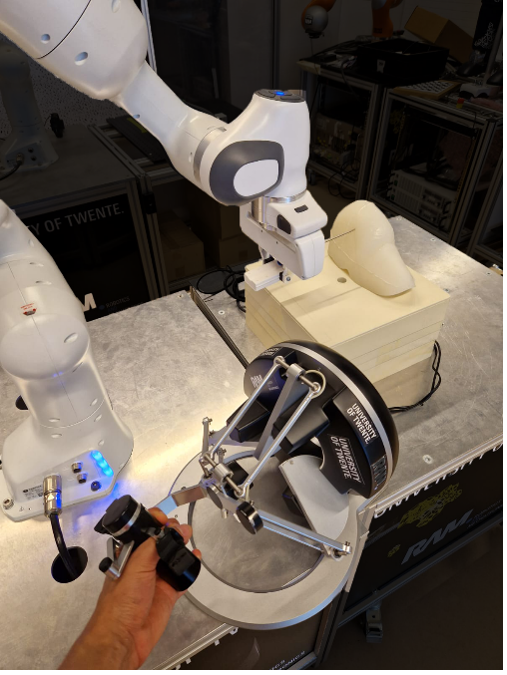
Figure 1. Experimental setup of needle insertion using Omega-7 on a liver phantom
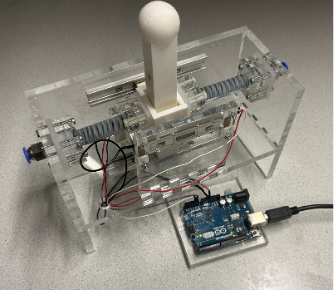
Figure 2. One DOF Pneumatic Haptic Device