Plastic pollution is considered one of the most challenging environmental risks globally, and rivers have been identified as a dominant pathway for the accumulation of plastic in the oceans. The Flyflic (FLYing companion for Floating LItter Collection) project addresses this global challenge by deploying a first-of-its-kind robotic platform composed of multiple unmanned aerial robots to effectively collect litter from rivers and canals, thus preventing such litter from reaching our oceans. Chiara Gabellieri will carry out the Flyflic project under the supervision of Prof. Antonio Franchi at the University of Twente (UT), The Netherlands. The project contributes to European strategic priorities (Horizon Europe Mission on healthy oceans, seas, coastal and inland waters) and global strategic priorities (United Nations Sustainable Development Goals). Compared to state-of-the-art solutions, which are mainly boat-like robots or fixed trapping mechanisms, a flying platform can target desired spots, can easily discharge the collected litter, is low cost, and is not hindered by non-navigable spots such as dams and low bridges.
If you are interested in knowing more about the project and in collaborations, please contact c.gabellieri@utwente.nl
Funded under: Marie Skłodowska-Curie Actions (MSCA), Grant agreement ID: 101059875
Media Appearance
On March 5, 2024, U-today posted an article about Flyflic. Enjoy your reading!
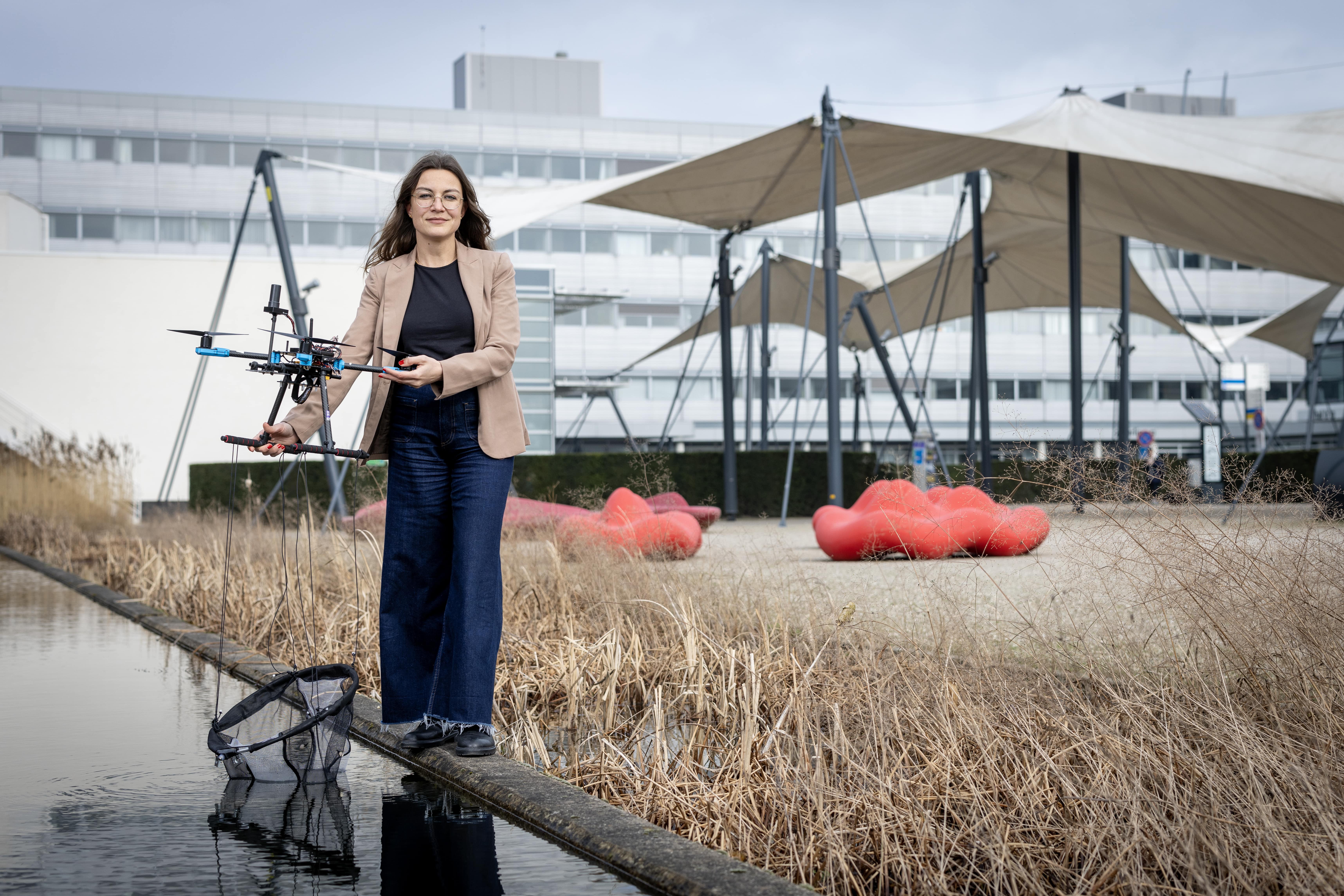
foto by Rikkert Harink
Proof of Concept

On March 3, we delivered a proof of concept of Flyflic! The demo is only the first, preliminary step toward achieving the project's goals. It demonstrates that litter collection on the water is possible with an operated drone and provides useful insights into future directions as well as additional motivation to pursue a higher degree of automation of the task.
Demo
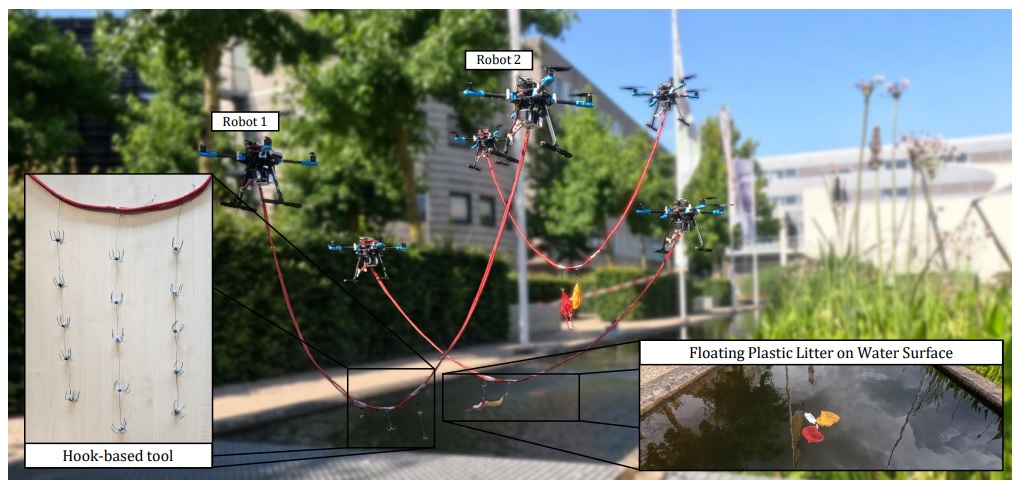
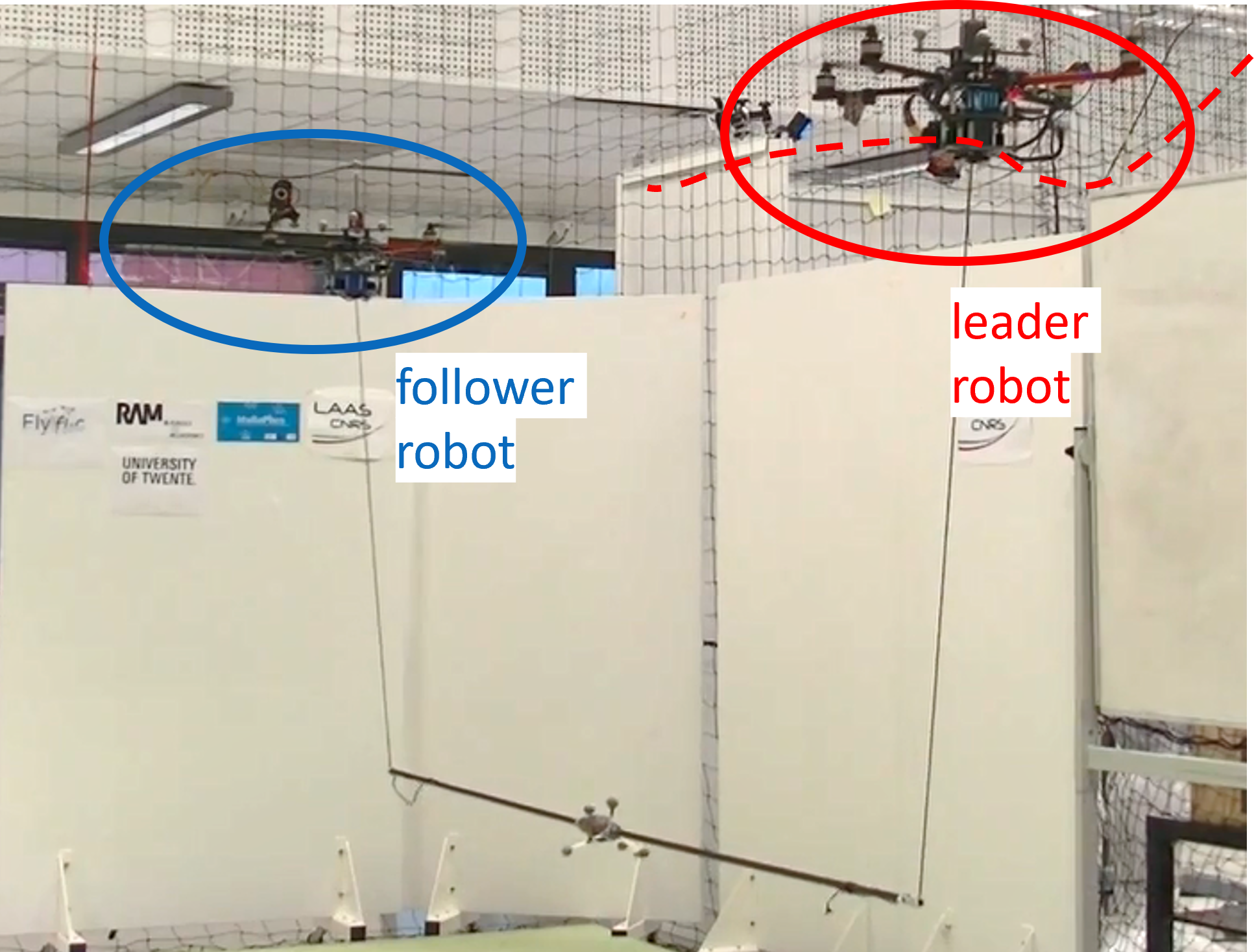
In a collaborative work with the GRVC Robotics Lab of the University of Seville (Spain) and the Inria, University of Rennes, CNRS, IRISA (France), we demonstrated a multi-robot aerial soft manipulator for floating litter collection at the University of Twente Campus! Find out more at https://arxiv.org/pdf/2507.03517
Dissemination
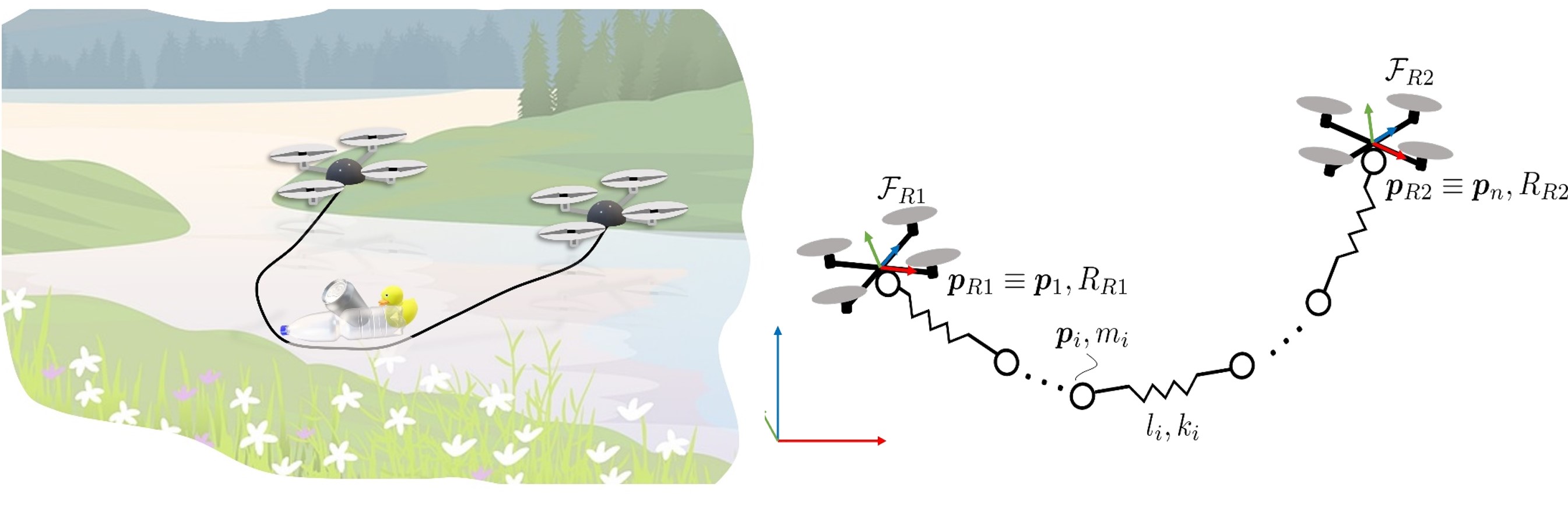
- Some of the latest results obtained by the Flyflic project have been collected in a scientific paper accepted for publication at IROS 2025. The work, "Manipulation of Elasto-Flexible Cables with Single or Multiple UAVs" by C. Gabellieri, L. Teeuwen, Y. Shen, and A. Franchi, proves the differential flatness of a wide class of systems composed of quadrotors manipulating deformable cables. You can find more details and the results of the experiments in the preprint and the video!


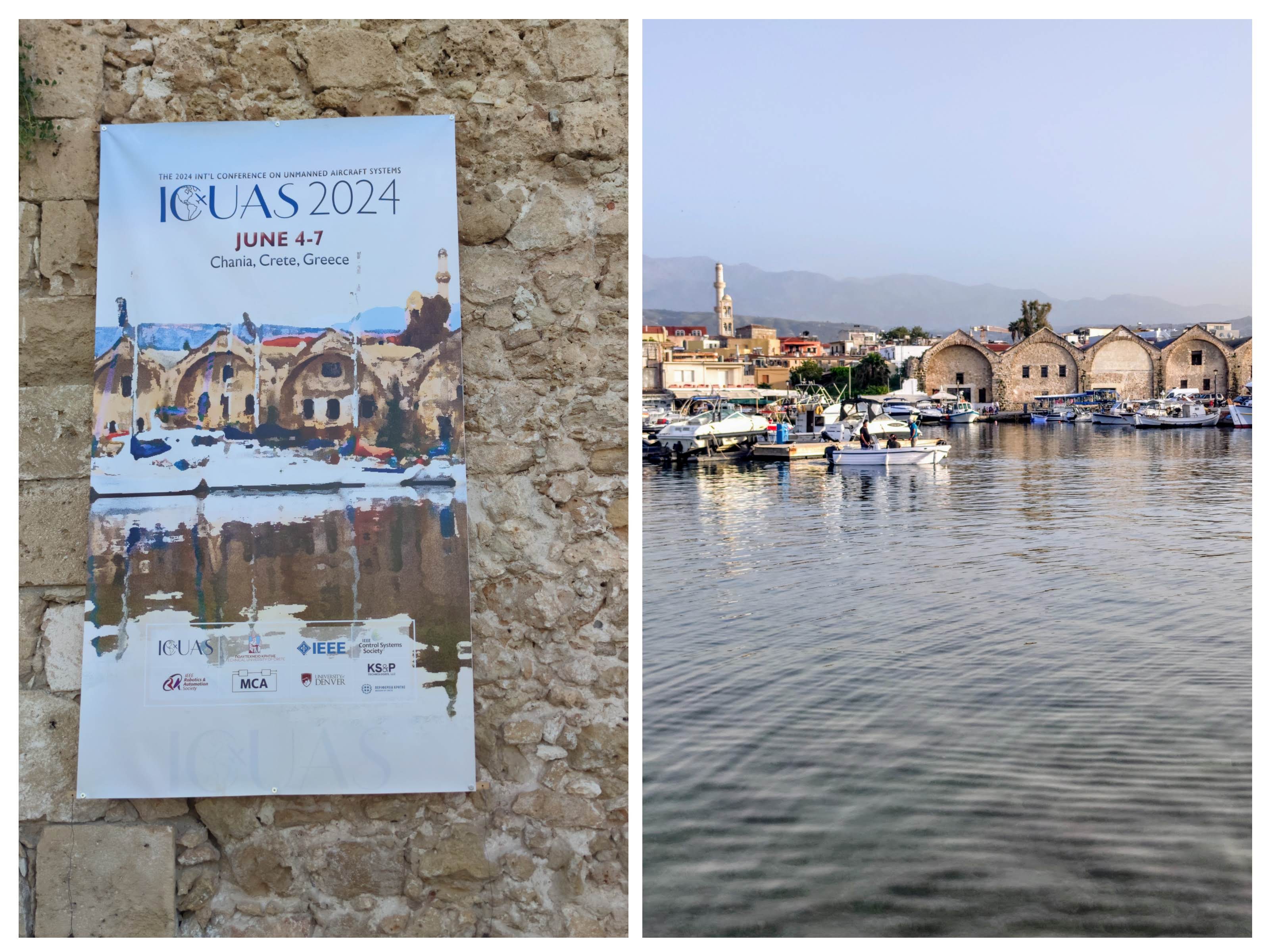
- Three papers co-supported by Flfyflic have been presented at the International Conference on Unmanned Aircraft Systems ICUAS'24, the most important international conference of the year on UAVs! Check out our work
- "Towards Instance Segmentation Based Litter Collection With Multi-Rotor Aerial Vehicle" Filip Zorić, Antonio Franchi, Matko Orsag, Zdenko Kovacic, Chiara Gabellieri
- "On the Existence of Static Equilibria of a Cable-Suspended Load with Non-stopping Flying Carriers" Chiara Gabellieri, Antonio Franchi
- "An Experimentally Validated Model of the Propeller Force Accounting for Cross Influences on Multi-Rotor Aerial Systems" Barbara Bazzana, Ralph Brantjes, Chiara Gabellieri, Antonio Franchi

- Watch the video of our latest results in collaboration with the University of Zagreb on autonomous litter collection
- What if force-based aerial cooperative manipulation is carried out in the presence of biases affecting the force information known by the robots? Our last paper, which Chiara had the opportunity to present at IROS 2023, tackles this interesting and realistic problem!
- Read the open-access version here!

- Chiara presented the paper "Differential Flatness and Manipulation of Elasto-flexible Cables Carried by Aerial Robots in a Possibly Viscous Environment" at the ICUAS 2023 conference!
- Read the open-access version here!
- Our paper on "Equilibria, Stability, and Sensitivity for the Aerial Suspended Beam Robotic System Subject to Parameter Uncertainty" has been published don the IEEE Transactions on Robotics!
-
Chiara presented the Flyflic project and its preliminary results at DroneDays 2023! The third edition of the end-user workshop for aerial vehicles was held in May 4-5, 2023, in Zagreb, Croatia. She had the pleasure and honor to be an invited speaker, giving with a talk on "present and future of aerial manipulation with single and multiple aerial robots: a control perspective".


- Very successful workshop at ICRA 2023 supported by Flyflic to discuss the role of simulators for UAVs.
- The recordings of the workshop are available here!


Associated assignments
| Manipulation of deformable cables using aerial robots | Lars Teeuwen |
| Assessment of the trajectory control performance on the Omnimorph, an omnidirectional morphing multirotor UAV | Ahmed Tamer Salah Abdo Ali |
| Aerial robotic cooperative manipulation of cable-suspended loads exploiting cable slackness | Karun Ashok Kumar |
| Impact Aware Aerial Robotics | Gayatri Indukumar |
| Study the outdoor performance of an open-hardware/source race-level quadrotor | Remmelt Fopma |
| Aerial manipulation of deformable objects | Vignesh Balaji Vijayan |